Ximeng Tao
Ximeng Tao
Home
Publications
Patents
Projects
CV
Light
Dark
Automatic
MATLAB
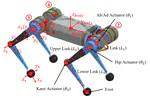
Quadruped robot modeling and simulation
Simulation in MATLAB for quadruped robot kinematics, dynamics, and itrajectory planning.
UR5e modeling and simulation
Simulation in MATLAB for robotic arm UR5e trajectory planning without relying on the Robotics System Toolbox.
Code
Cite
×