Ximeng Tao
Ximeng Tao
Home
Publications
Patents
Projects
CV
Light
Dark
Automatic
Continuum surgical robot
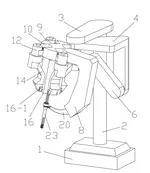
Variable-stiffness robot for minimally invasive surgery and working method
The invention relates to a variable stiffness robot facing minimally invasive surgery and a working method, wherein the variable …
Fuxin Du
,
Jiajia Lu
,
Gang Zhang
,
Hailin Sun
,
Ximeng Tao
,
Lianchen Qu
,
Zihao Wang
,
Tao Zhang
,
Haojin Yang
PDF
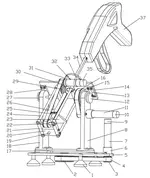
Main manipulator for continuum surgical robot and surgical robot
The invention discloses a main manipulator for a continuum operation robot and the operation robot, which solve the problem that the …
Yanqiang Lei
,
Yibing Li
,
Fuxin Du
,
Gang Zhang
,
Ximeng Tao
,
Gan Wang
,
Tao Zhang
PDF
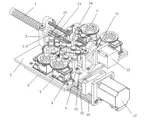
Double-operation mode surgical robot capable of realizing multi-hole single-hole interchange
The invention relates to a double-operation mode surgical robot capable of realizing multi-hole and single-hole interchange, which …
Fuxin Du
,
Ximeng Tao
,
Gang Zhang
,
Hehua Zhang
,
Jiaqi Chen
,
Shuo Li
,
Tao Zhang
PDF
Restricted continuum surgical robot
Based on the variable stiffness continuum robot, designed a novel restricted continuum robot.
Video
Variable-stiffness continuum surgical robot
Researched in continuum surgical robot, and worked on the method of variable stiffness of the continuum robot.
Video
Cite
×