Ximeng Tao
Ximeng Tao
Home
Publications
Patents
Projects
CV
Light
Dark
Automatic
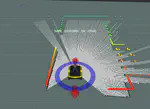
Autonomous mobile robot
Autonomous mobile robot simulation and navigation in ROS and Gazebo
Implemented SLAM algorithm A-LOAM for mapping, and navigated robot in Gazebo.
Code
Cite
×