Variable-stiffness robot for minimally invasive surgery and working method
Abstract
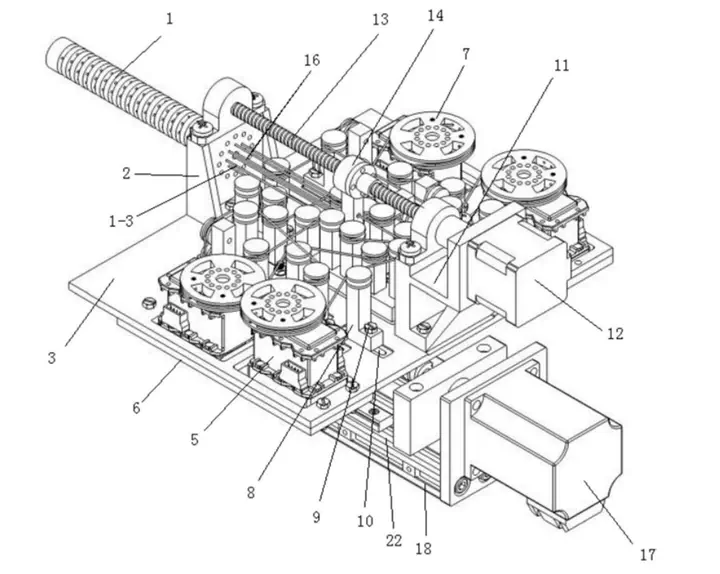
The invention relates to a variable stiffness robot facing minimally invasive surgery and a working method, wherein the variable stiffness robot comprises the following components:mechanical arm:the front end of the flexible pipe is connected with a mechanical arm support fixed on a bottom plate and comprises a flexible pipe, a plurality of joints and a plurality of groups of ropes, the adjacent joints are in spherical contact, the flexible pipe penetrates through all the joints, the ropes penetrate through all the joints and are uniformly distributed along the circumference concentrically arranged with the joints, two ropes in one group are arranged at two ends of the circumference diameter, one end part of each rope is fixedly connected with the joint at the tail end of the mechanical arm, and the other end of each rope penetrates through the mechanical arm support; a bending mechanism:the rope winding machine comprises a plurality of rotatable turntables arranged on a bottom plate, wherein two ropes in one group are fixedly connected with the same turntable after penetrating through a mechanical arm support, and one rope can be retracted and released while the other rope is rotated by the turntables; rigid rod:the robot can extend into or out of the flexible pipe to change the rigidity of the mechanical arm, and can provide rigid support for the mechanical arm, so that the damage to a human body is avoided.