High-rigidity flexible full-assembly friction identification servo feeding device and method
Abstract
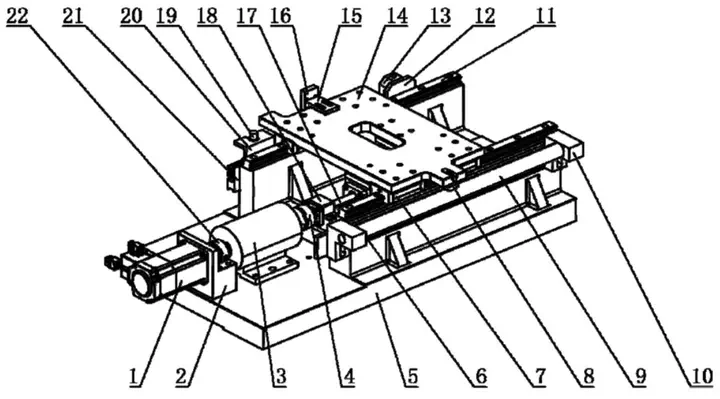
The invention relates to a high-rigidity smart full-component friction identification servo feeding device and a method, the device can respectively measure the friction force in a mechanism and accurately identify friction parameters, and can be provided with most of the sensors of current universal models, such as a torque sensor, a force sensor, a grating ruler, a switch, a proximity switch and the like, and the new structural design improves the integral rigidity of the device and ensures the measurement accuracy and the structural flexibility. The sensors can be detached and replaced, and after the force sensor and the torque sensor are removed, the device is a feeding mechanism of a ball screw and a linear guide rail, and can be used as a contrast experiment of friction compensation to verify the effectiveness of the new method. The invention uses GMS (generalized scaled Maxwell slip) model to build a refined friction model of the servo feeding system. A novel time domain identification method is adopted, so that the friction parameters of all components of the device can be effectively and respectively identified.