Rope-driven flexible exoskeleton power-assisted robot
Abstract
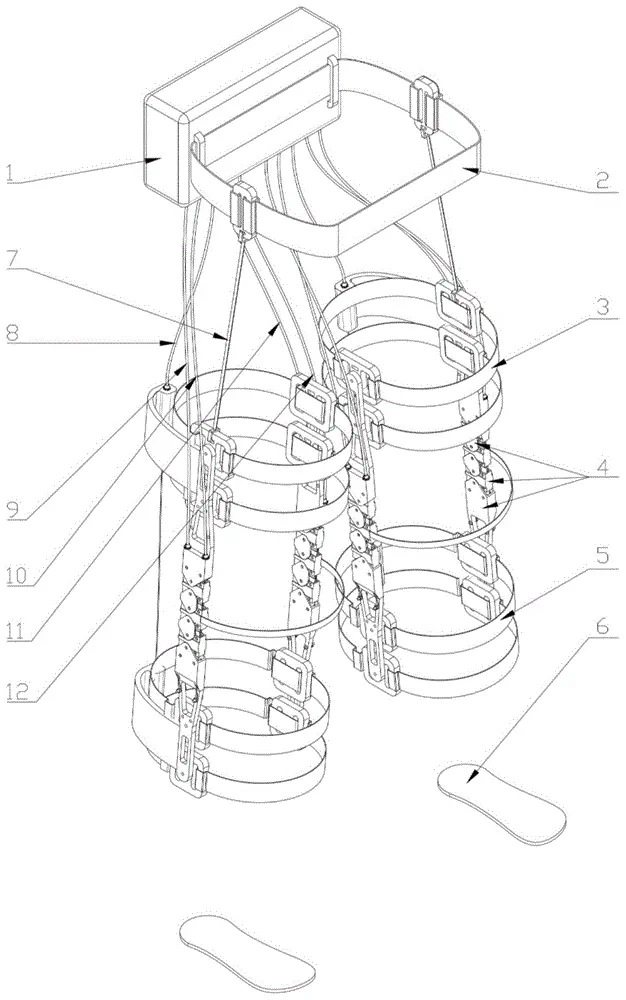
The invention discloses a rope-driven flexible exoskeleton power-assisted robot, which comprises a belt, wherein two leg fixing devices are correspondingly arranged below the belt and arranged in parallel, each leg fixing device comprises a thigh fixing belt, a shank fixing belt is correspondingly arranged below the thigh fixing belt, and a buckle bending device is connected between the thigh fixing belt and the shank fixing belt; the waistband is connected with the controller, sets up steering wheel and singlechip in the casing of controller, and steering wheel and singlechip link to each other, and the steering wheel passes through the silk sheath and is connected with buckle bending apparatus.
Type
Publication
CN110861074B