Double-operation mode surgical robot capable of realizing multi-hole single-hole interchange
Abstract
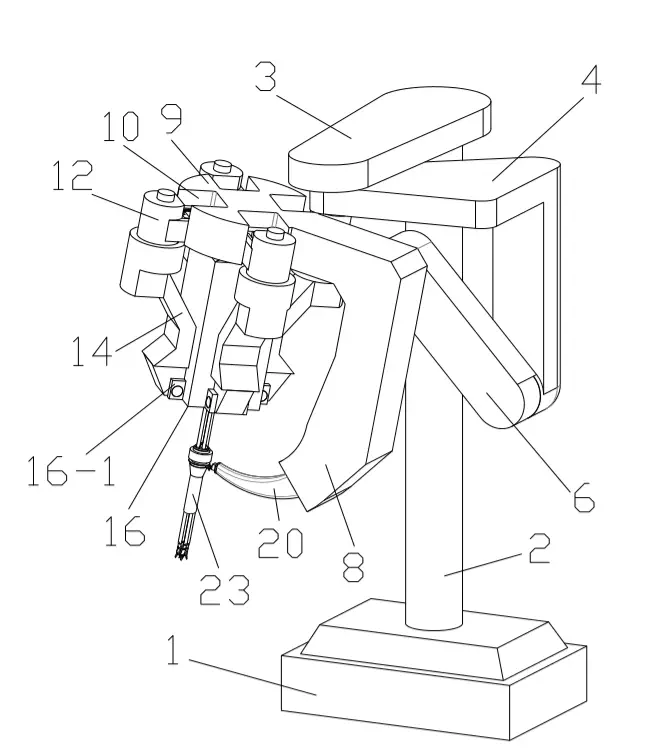
The invention relates to a double-operation mode surgical robot capable of realizing multi-hole and single-hole interchange, which comprises a main arm, wherein a plurality of first driving parts distributed along the circumference are arranged at the top end of the main arm, the first driving parts are connected with a sub-arm assembly, the first driving parts can drive the sub-arm assembly to open and close, the sub-arm assembly comprises a second driving part connected with the first driving parts, the second driving part is connected with a sub-arm and can drive the sub-arm to rotate, the axial lines of output shafts of the first driving parts and the second driving parts are vertical, the sub-arm is connected with a workbench, and the workbench is used for installing a line to drive a surgical actuator.