Main manipulator for continuum surgical robot and surgical robot
Abstract
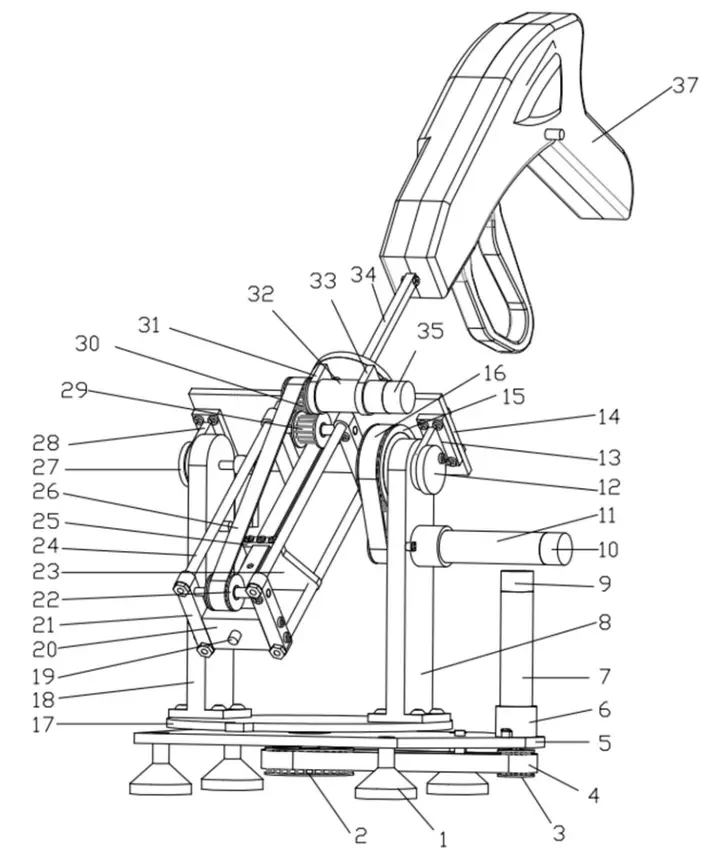
The invention discloses a main manipulator for a continuum operation robot and the operation robot, which solve the problem that the prior art can not meet the control requirement of the continuum operation robot, have the beneficial effect of providing multi-degree-of-freedom force feedback, and have the following specific schemes :a main manipulator for a continuum surgical robot, comprising a base; the horizontal deflection mechanism comprises a base cover and a first angle detection piece, wherein the base cover can rotate relative to the base; the vertical deflection mechanism comprises a top plate and a second angle detection piece, the top plate is supported on the base cover through a support arm, and the top plate can rotate relative to the support arm; the feeding mechanism comprises a telescopic rod and a third detection piece, the telescopic rod penetrates through the top plate and is connected with the lifting piece; the data acquisition mechanism is used for acquiring the position change of at least one of the horizontal deflection machine, the vertical deflection mechanism and the feeding mechanism and calibrating the original points of all the mechanisms; a hand-held mechanism.