Variable-stiffness continuum surgical robot
Date: 2019-08
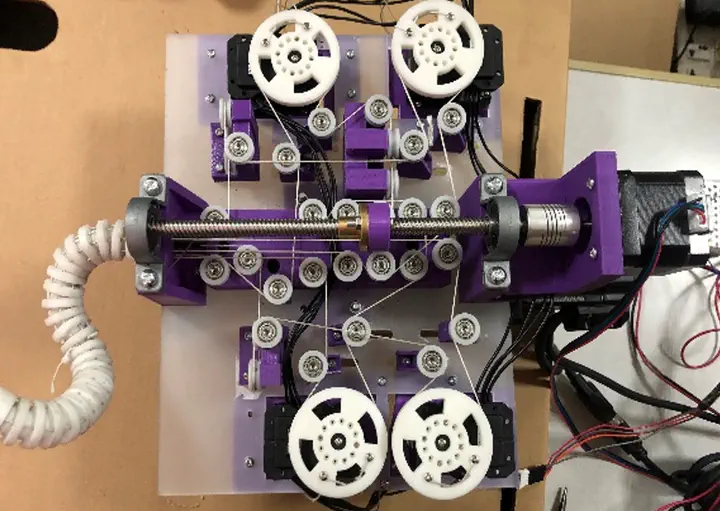
Researched in continuum surgical robot, and worked on the method of variable stiffness of the continuum robot.

Thanks to other team members, Gang Zhang, Hailin Sun, etc.
Date: 2019-08
Researched in continuum surgical robot, and worked on the method of variable stiffness of the continuum robot.
Thanks to other team members, Gang Zhang, Hailin Sun, etc.