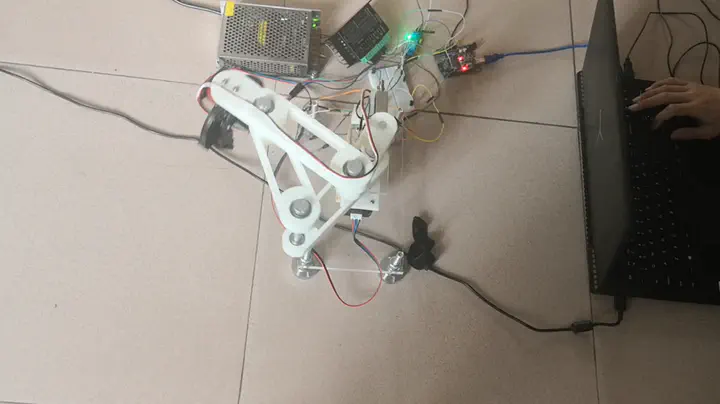
Underactuated robotic arm based on parallelogram mechanism
Date: 2020-06
Mechanical design, electronics design, and programming for an underactuated robot arm.
Model:
Control the end-effector with Xbox wireless controller:
Thanks to other team members, Yanjie Xu, Yibo Liu, etc.