Humanoid Robot Shoes Design and Model-free Self-calibration Methods
Date: 2023-05

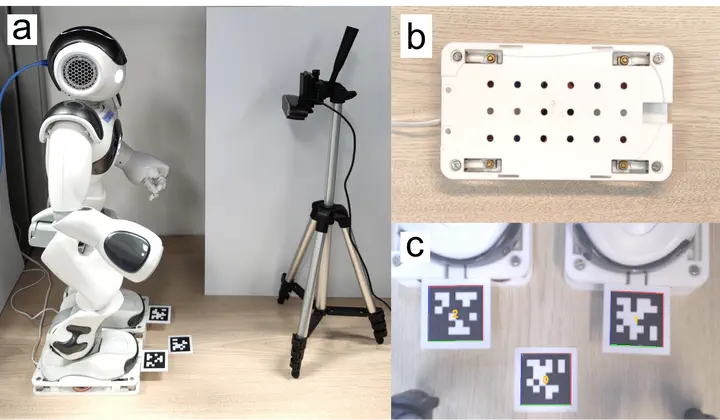
A solution combing FSR and shoes is proposed.
FSR data acquisition PCB are designed:
There are three reference frames in the experiment: camera frame, world frame, and foot frame:
In experiment, Nao moves itself CoP from the middle to the right side by the model-free control method.
Different postures when the robot moves the CoP to different points on the path.
When the sensor is accurate, the experimental results of running the same path three times.

Thanks to other team members, Boren Jiang, etc. Thanks to my supervisor Prof. Gregory Chirikjian.